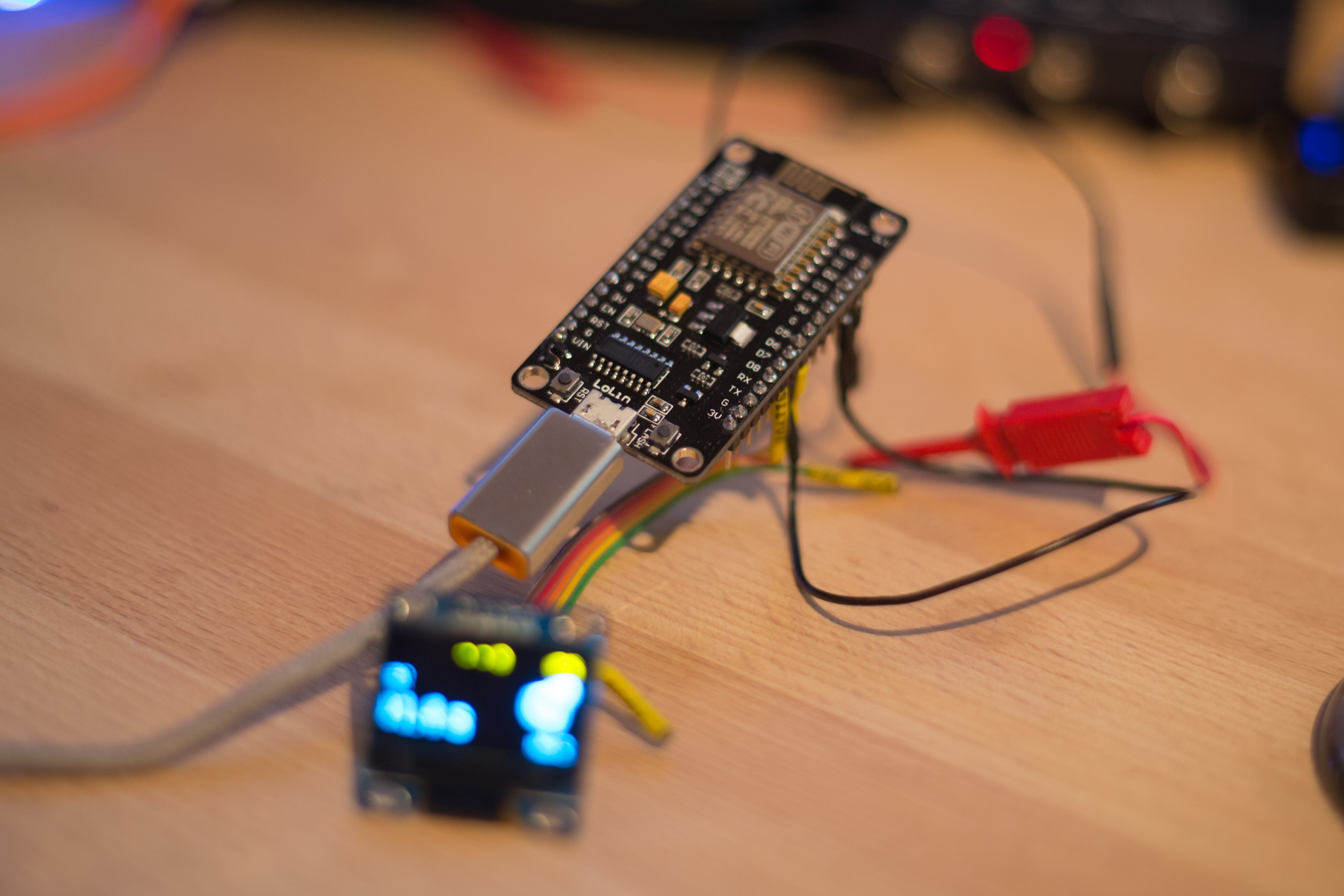
Recently I needed a CAN <-> WiFi router at work. As I didn’t want to use a several thousand euro hardware that sucks a few amps at 12V,
I decided to implement that using the ESP8266 and a CAN transceiver.
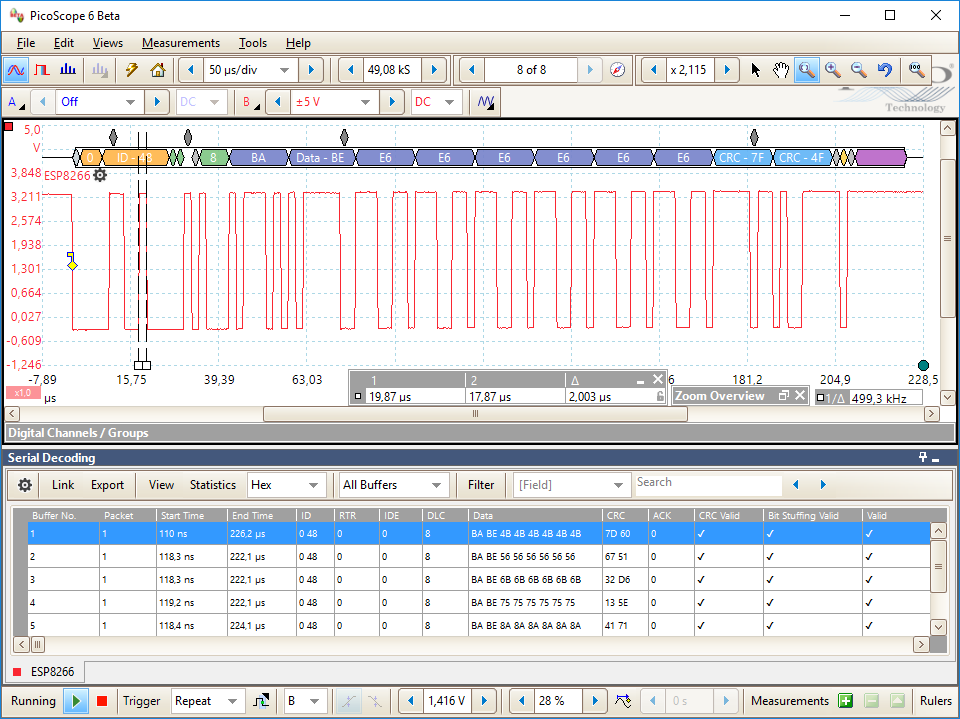
Well, it works quite stable, just a few things here and there. E.g. I cannot ACK messages as I am using I2S to sample the CAN Rx path.
Also the I2S seems not very stable and goes crazy every 20 minutes at 1.5 MHz sampling rate, so that I implemented a detection and restart procedure.
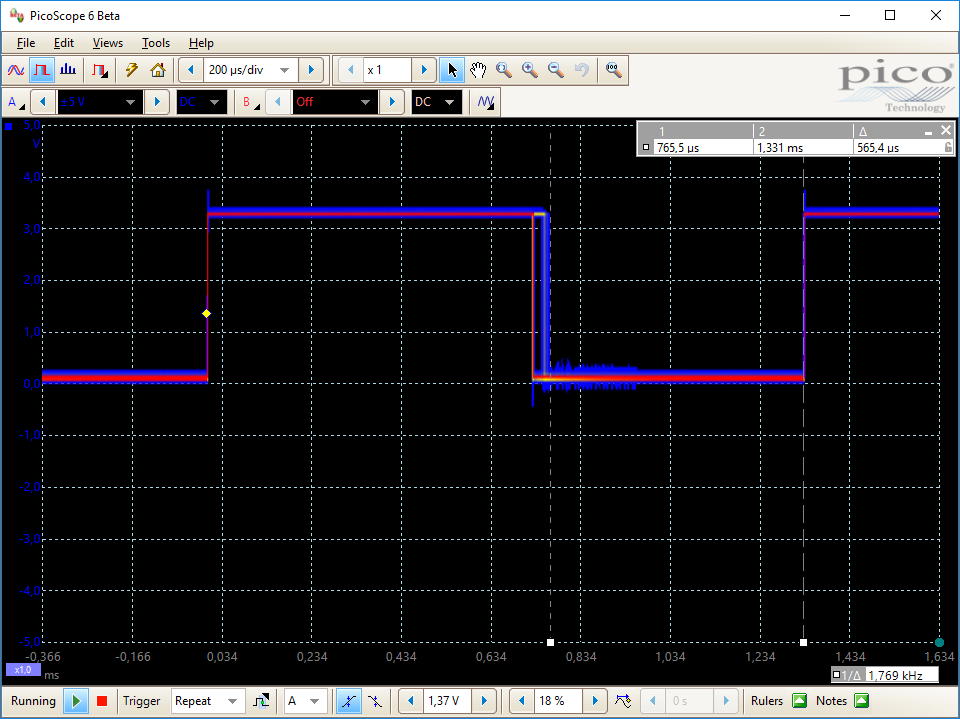
Here is a picture of the ISR execution time – it is quite stable at 725µs – 765µs
But aside of these minor issues, the ESP8266 is now ready for its use case – routing between WiFi and CAN :)
Here is the library: GitHub – g3gg0/esp8266can